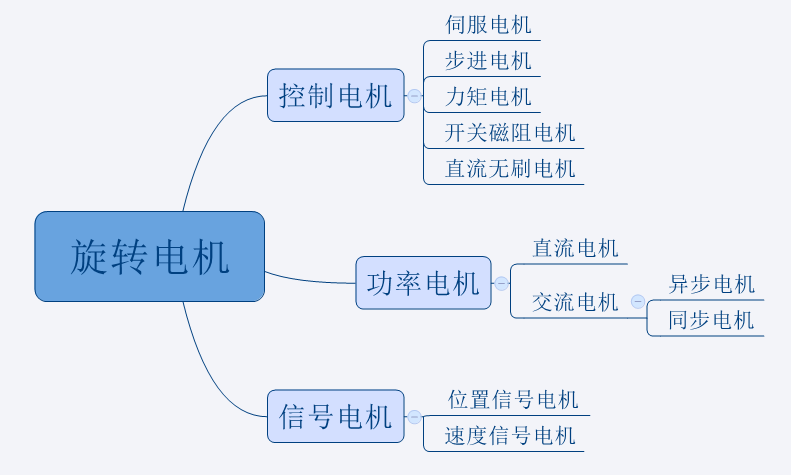
控制电机主要是应用在精确的转速、位置控制上,在控制系统中作为“执行机构”。可分成伺服电机、步进电机、力矩电机、开关磁阻电机、直流无刷电机等几类。
1、伺服电机
伺服电动机有直流和交流之分,最早的伺服电动机是一般的直流电动机,在控制精度不高的情况下,才采用一般的直流电机做伺服电动机。目前的直流伺服电动机从结构上讲就是小功率的直流电动机,其励磁多采用电枢控制和磁场控制,但通常采用电枢控制。
伺服电机广泛应用于各种控制系统中,主要应用在各种运动控制系统中,尤其是随动系统。能将输入的电压信号转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。一般情况下,伺服电机要求电机的转速要受所加电压信号的控制,转速能够随着所加电压信号的变化而连续变化,转矩能通过控制器输出的电流进行控制,电机的反映要快、体积要小、控制功率要小。
2、步进电机
所谓步进电机就是一种将电脉冲转化为角位移的执行机构。即当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。我们可以通过控制脉冲的个数来控制电机的角位移量,从而达到精确定位的目的。同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。目前,比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
步进电机和普通电机的区别主要就在于其脉冲驱动的形式,因此步进电机可以和现代的数字控制技术相结合,且具有结构简单、可靠性高和成本低的特点。但是步进电机在控制精度、速度变化范围、低速性能方面都不如传统闭环控制的直流伺服电机,所以步进电机广泛应用在生产实践等精度要求不是特别高的各个领域,尤其是在数控机床制造领域。而且步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以一直被认为是最理想的数控机床执行元件。
除了在数控机床上的应用,步进电机也可以用在其他的机械上,比如作为自动送料机中的马达,作为通用的软盘驱动器的马达,也可以应用在打印机和绘图仪中。
此外,步进电机也存在许多缺陷。由于步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声。不同厂家的细分驱动器精度可能差别很大,细分数越大精度越难控制。并且,步进电机低速转动时有较大的振动和噪声。
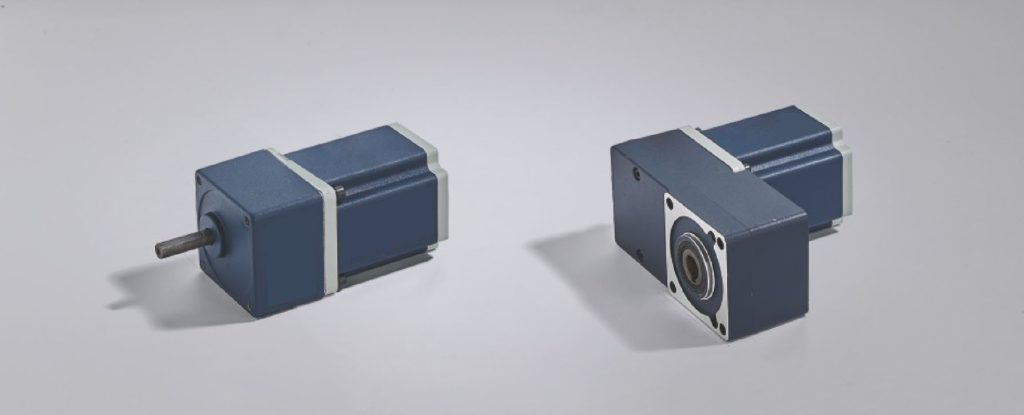
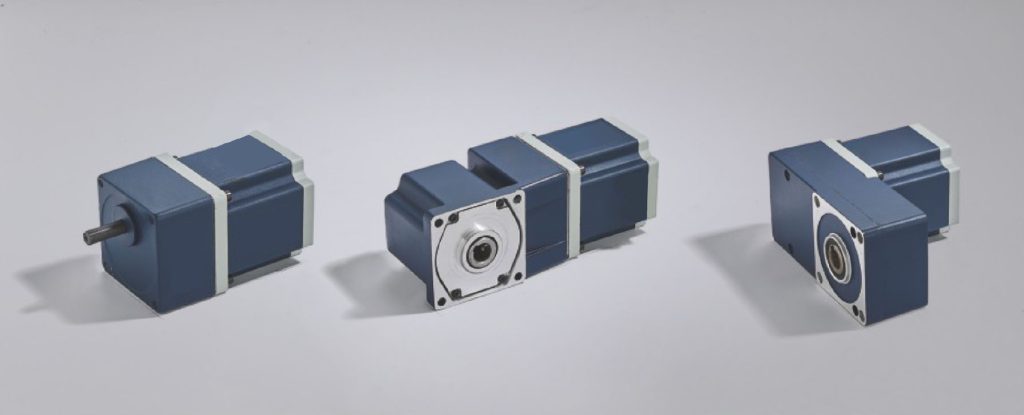
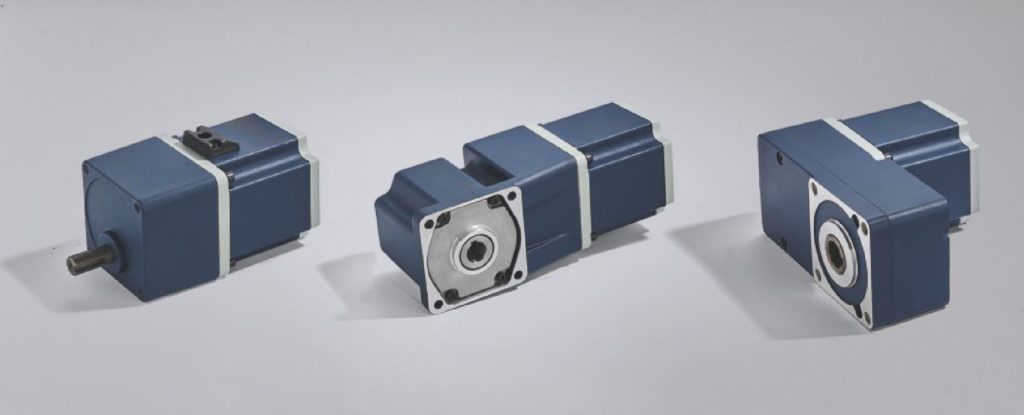
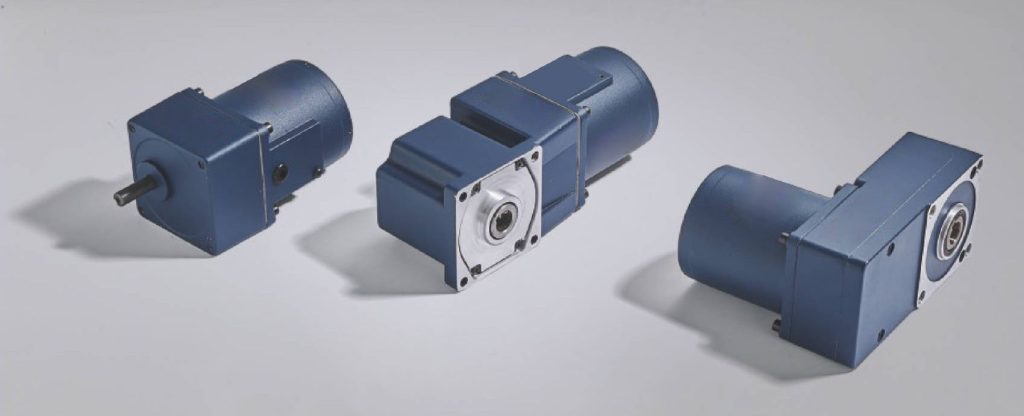
3、力矩电机
所谓的力矩电机是一种扁平型多极永磁直流电机。其电枢有较多的槽数、换向片数和串联导体数,以降低转矩脉动和转速脉动。力矩电机有直流力矩电机和交流力矩电机两种。
其中,直流力矩电机的自感电抗很小,所以响应性很好。其输出力矩与输入电流成正比,与转子的速度和位置无关。它可以在接近堵转状态下直接和负载连接低速运行而不用齿轮减速,所以在负载的轴上能产生很高的力矩对惯性比,并能消除由于使用减速齿轮而产生的系统误差。
交流力矩电机又可以分为同步和异步两种,目前常用的是鼠笼型异步力矩电机,它具有低转速和大力矩的特点。一般在纺织工业中经常使用交流力矩电机,其工作原理和结构和单相异步电机的相同,但是由于鼠笼型转子的电阻较大,所以其机械特性较软。

TP系列力矩电机
4、开关磁阻电机
开关磁阻电机是一种新型调速电机,结构极其简单且坚固,成本低,调速性能优异,是传统控制电机强有力竞争者,具有强大的市场潜力。但目前也存在转矩脉动、运行噪声和振动大等问题,需要一定时间去优化改良以适应实际的市场应用。
5、无刷直流电机
无刷直流电机(BLDCM)是在有刷直流电机的基础上发展来的,但它的驱动电流是不折不扣的交流。无刷直流电机又可以分为无刷速率电机和无刷力矩电机。一般地,无刷电机的驱动电流有两种,一种是梯形波(一般是“方波”),另一种是正弦波。有时候把前一种叫直流无刷电机,后一种叫交流伺服电机,确切地讲也是交流伺服电机的一种。
无刷直流电机为了减少转动惯量,通常采用“细长”的结构。无刷直流电机在重量和体积上要比有刷直流电机小的多,相应的转动惯量可以减少40%—50%左右。由于永磁材料的加工问题,致使无刷直流电机一般的容量都在100kW以下。
这种电机的机械特性和调节特性的线性度好,调速范围广,寿命长,维护方便噪声小,不存在因电刷而引起的一系列问题,所以这种电机在控制系统中有很大的应用潜力。