负载12 Kg的六自由度工业机器人为例,其三维模型如图1所示。该机器人的构型是现代工业机器人的常用构型:即有6个旋转关节,每个旋转关节代表一个自由度,前3个关节用于确定末端执行器的位置,后3个关节则用以确定末端执行器的姿态,并且后3个关节的轴线相交于一点,这种结构也是工业机器人中经典的6自由度分配方式,有利于表示和计算工业机器人的封闭解。为了方便建立数学模型,将六个坐标系的原点分别固定在各关节的中心,取关节的轴线为坐标系的Z轴,如图2所示。

图1 负载12 Kg的六自由度工业机器人三维模型

图2 机器人连杆坐标系
设机器人六个关节的转角变量为:θ=[θ1θ2 θ3θ4θ5θ6] ;各关节的驱动力矩变量为:T=[T1T2T3T4T5T6];机器人连杆的动能为:

式中:Uij、Uik为变换矩阵关于关节转角的导数;Ji、Ii为伪惯量矩阵和驱动器的转动惯量。qa每个关节件的势能综合,因此又可以写成:

式中:gT为重力矩阵,gT=[gx gy gz 0];0Ti为坐标系i相对于基坐标系的坐标变换;ri为连杆质心在坐标系i中的位置。综上所述,可得系统的拉格朗日方程为:

机器人相对于其他机械结构,其空间结构较为复杂,可以看成是由转动关节连接的空间结构系。可以对拉格朗日函数求导后带入![]() 得到机器人系统的动力学方程。联立带入后可得:
得到机器人系统的动力学方程。联立带入后可得:

式中![]() 为广义加速度所产生的惯性力对动力系统的影响;
为广义加速度所产生的惯性力对动力系统的影响;![]() 为电机等驱动装置所产生的惯量项;
为电机等驱动装置所产生的惯量项;![]() 为科氏力和向心力;Di为重力对关节转矩的影响。其中:
为科氏力和向心力;Di为重力对关节转矩的影响。其中:



最终求得Ti。

机器人产生的力矩很大一部分是来自于各关节角加速度惯量和重力,而科氏力与向心力对机器人的力矩影响较小,在这里可以忽略不计。以负载12kg的六自由度工业机器人为例,机器人在运动过程中2、3、5、6关节有重力矩的产生,电机需要提供动力矩和重力矩。1、4关节电机基本无需提供重力矩(只需减速提供倾覆力矩,多数减速机能够满足,在这里不做介绍和校核计算)。该机器人控制系统采用KEBA控制系统,从控制系统对机器人控制过程中采集的数据来看,控制系统控制机器人运动时,加速度趋近正弦平方加速度。因此,本文提出的电机减速机选型校核技术,运动的加速度类型采用正弦平方加速度如图3所示,以便更加符合实际检测。
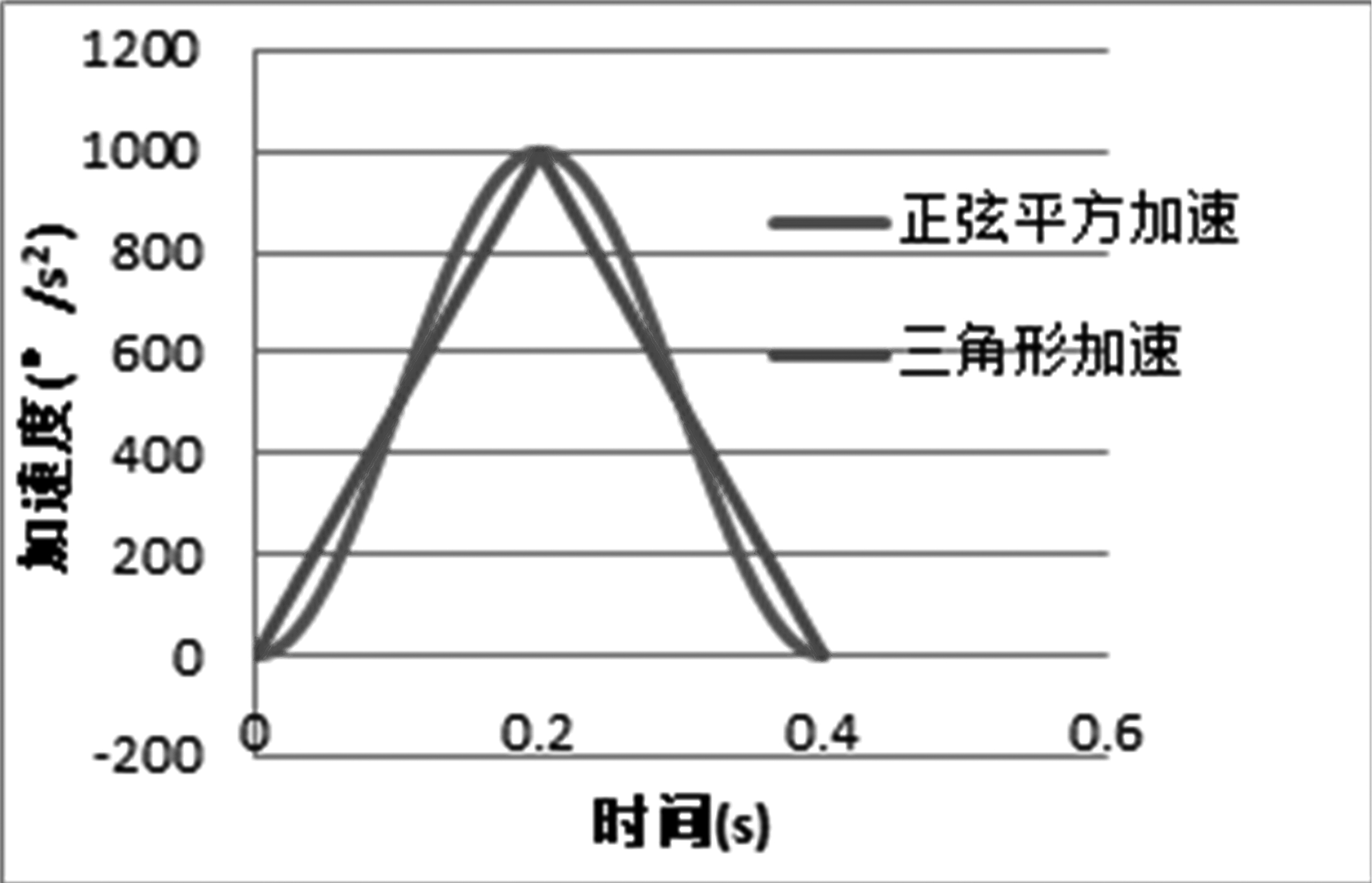
图3 校核技术加速度曲线
选型校核时,需根据选择的电机、减速机参数,包括关节最大速度,加速时间、转动惯量(本体+负载)、电机转子惯量、减速比、传动效率,负载与转动关节的质量、负载质心到旋转中心得距离,减速机起停扭矩以及电机瞬时和连续工作曲线。如果电机转子的转动惯量在惯量比(电机负载惯量/电机转子惯量)小于10的情况下对电机调配运动参数时有较大影响,其自身消耗的动能不可忽视,因此需对此处注意,否则电机在实际调配时与设计时的预定参数反差较大,机器人无法达到预期性能。针对负载12Kg的工业机器人选型校核结果如图4-图9、表1。机器人J2、J3、J5关节的电机、减速机在选型时受重力矩影响较大,选型时需考虑的情况因素较多,对机器人的性能影响较大,所以选型校核的结果,选取J2、J3、J5关节进行典型分析,其他关节的选型校核结果,在这里不再赘述。该机型选用凯邦电机,J1、J2、J3、J4关节采用RV系列的减速机,J5、J6关节采用谐波减速机。RV减速机的传动效率较高,平均在0.8,而谐波减速机的传递效率相对较低约为0.75左右。
表1 机器人关节选型校核系统参数输入表


图4 机器人J2关节电机校核曲线

图5 机器人J2关节减速机校核曲线

图6 机器人J3关节电机校核曲线

图7 机器人J3关节减速机校核曲线

图8 机器人J5关节电机校核曲线

图9 机器人J5关节减速机校核曲线
从上述选型校核结构可以看出,该机型在电机、减速机的选型和运动参数的配置上较为合理,选配运动参数时未出现电机输出扭矩超过电机许用范围,减速机的输出扭矩也均在起停转矩的以下。在允许的工况范围内,理论上机器人不会出现参数调试超调,减速机运行损坏严重,使用寿命低的情况。根据上述选型校核曲线不难发现,J2关节电机输出扭矩曲线曲率较大,曲线比较平缓,造成上方留有较大空间,这对电机的性能来说也是一种浪费,出现这种结果的原因是,减速机速比较大,造成电机高转速下,关节的运动速度偏低,所配最高速度仅为130°/s。该关节所选减速机为RV-42N系列速比为164.07。根据选型校核系统来看,仍有优化空间,可选择则同型号下速比为105的减速机。优化结果如表2、图10所示,可以看出优化后的选型,机器人J2关节速度提升15.4 %,加速性能提升30 %。对于J3、J5减速机的选型校核来看,J3关节减速机输出最大扭矩为602.8 N.m,所选减速机的起停转矩为612 N.m;J5关节减速机输出最大扭矩为55.7 N.m,所选减速机起停转矩为57 N.m。输出最大转矩接近减速机起停转矩,所留余量为1.5 %、2.3 %较少,这说明机器人运行时超载性能较差,若长时间或过多超载运行,会严重影响机器人的使用寿命。
表2 机器人J2关节优化选型校核系统参数输入表


图10 机器人J2关节优化选型校核曲线