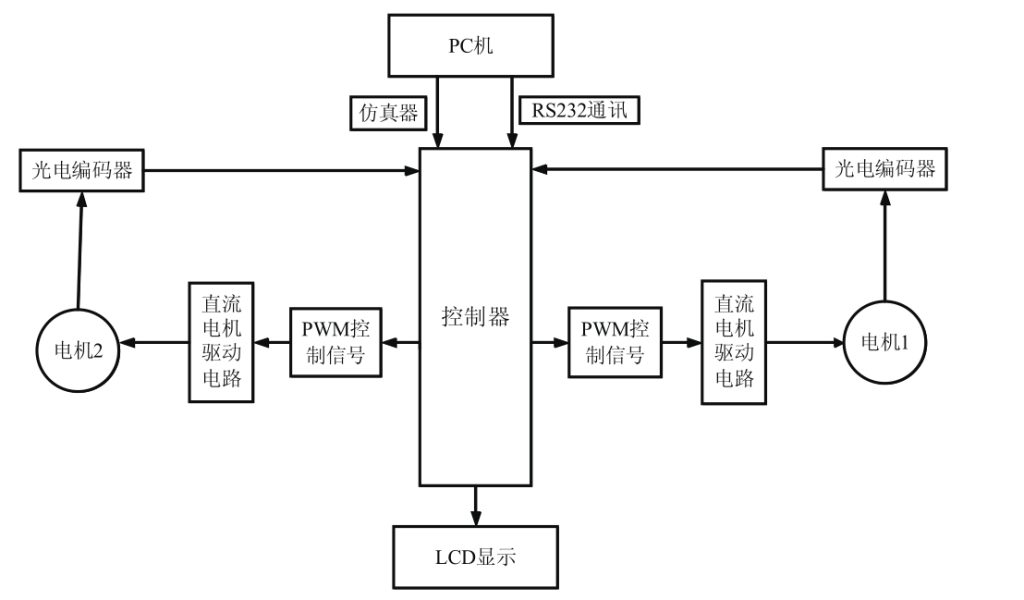
多直流减速电机协调控制通过PC机发送指令给DSP,DSP根据光电编码器采集到的速度值与设定值的偏差去调整PWM占空比,以此来控制电机转速,调速方案主要包括电机速度的检测和PWM占空比的动态调节。通过调节PWM的占空比,实现对电机速度的调整。PWM调速方法简单,调速范围宽,调速平滑与DSP控制器能够实现对占空比的精确调整,电机两端的端电压与占空比的关系如公式(1)[2]:
式中:U0为输出的端电压平均值,US为脉冲信号的最大值,T为PWM脉冲信号的周期,Ton为一个周期内电压为高的时间,α为占空比。
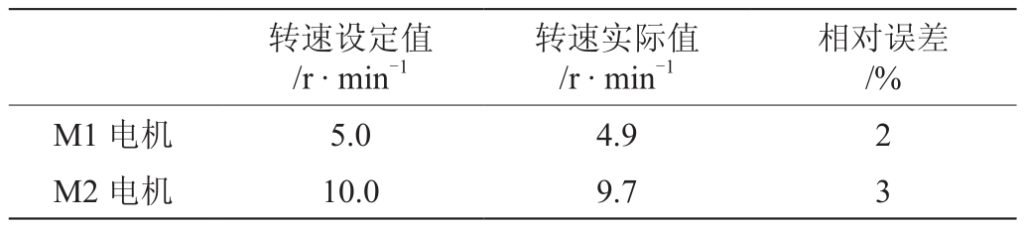
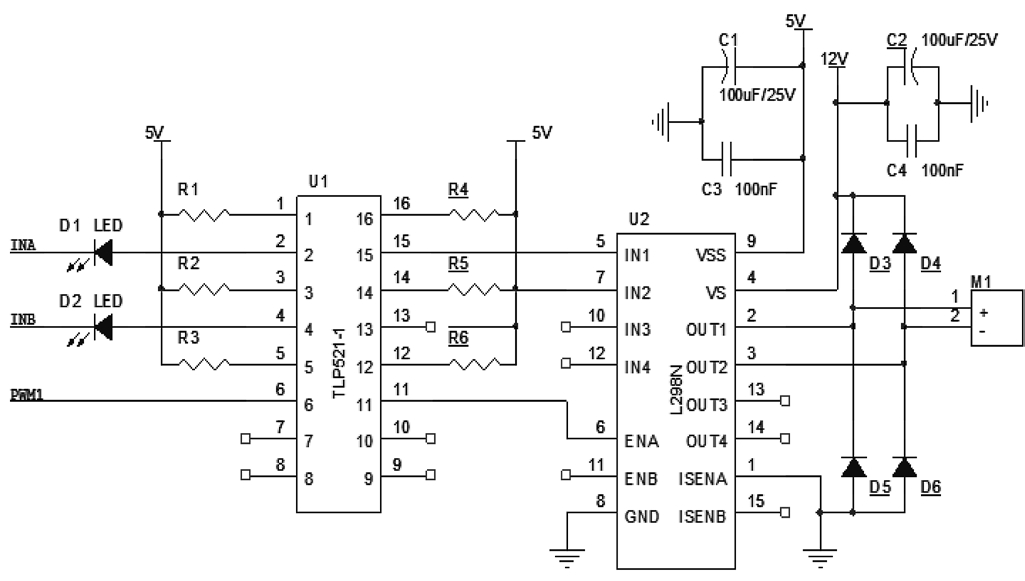
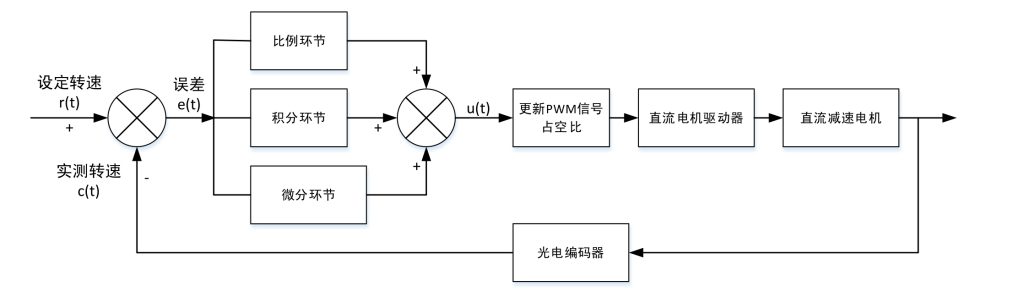
根据(1)式可知,通过调整PWM脉冲信号占空比进而改变端电压的值就实现调速。因为电机的转速与电压存在一定的关系,通过实验拟合出端电压与转速的关系,依此来实现电机转速的控制[3]。如果只有简单的开环控制,当电机转速出现偏差时,或需要改变电机速度时,速度的调整不能快速及时,在实际工程应用中可能会造成事故,因此引入PID调节,只要调整到合适的PID参数就可以实现电机转速的精确控制。直流减速电机PID控制原理框图如图3所示。r(t)是设定的电机转速值,c(t)是通过检速模块返回的电机实际速度值,e(t)是实际转速值c(t)与设定值r(t)的偏差,e(t)作为控制器的输入参数,DSP根据偏差值e(t)经PID调节以后,计算输出u(t),根据u(t)去调节PWM的占空比,将新得到的PWM控制信号传送给驱动电路,来驱动电机的旋转。
DSP控制器周期性的采集电机转速信号,属于离散控制系统,因此数字PID控制器的数学表达式为:
其中:u(k)是在第k次采样时,由此次偏差e(k)计算出来的控制器输出值;T为采样周期;k为采样序号,k=0,1,2…n。
由(2)式看出,积分环节需要一直累积偏差值,对控制器的资源消耗太大且会造成程序崩溃,考虑到数字信号处理器的性能和编程实际,简化了方法,采用增量型PID控制算法表达式为:

增量型PID控制算法,只需要根据前后三次采样定律所得的偏差,就可以确定系统的输出